Ani Perumalla
Ani Perumalla
Experience
Research
Publications
Skills
Personal
Contact
Light
Dark
Automatic
paper-conference
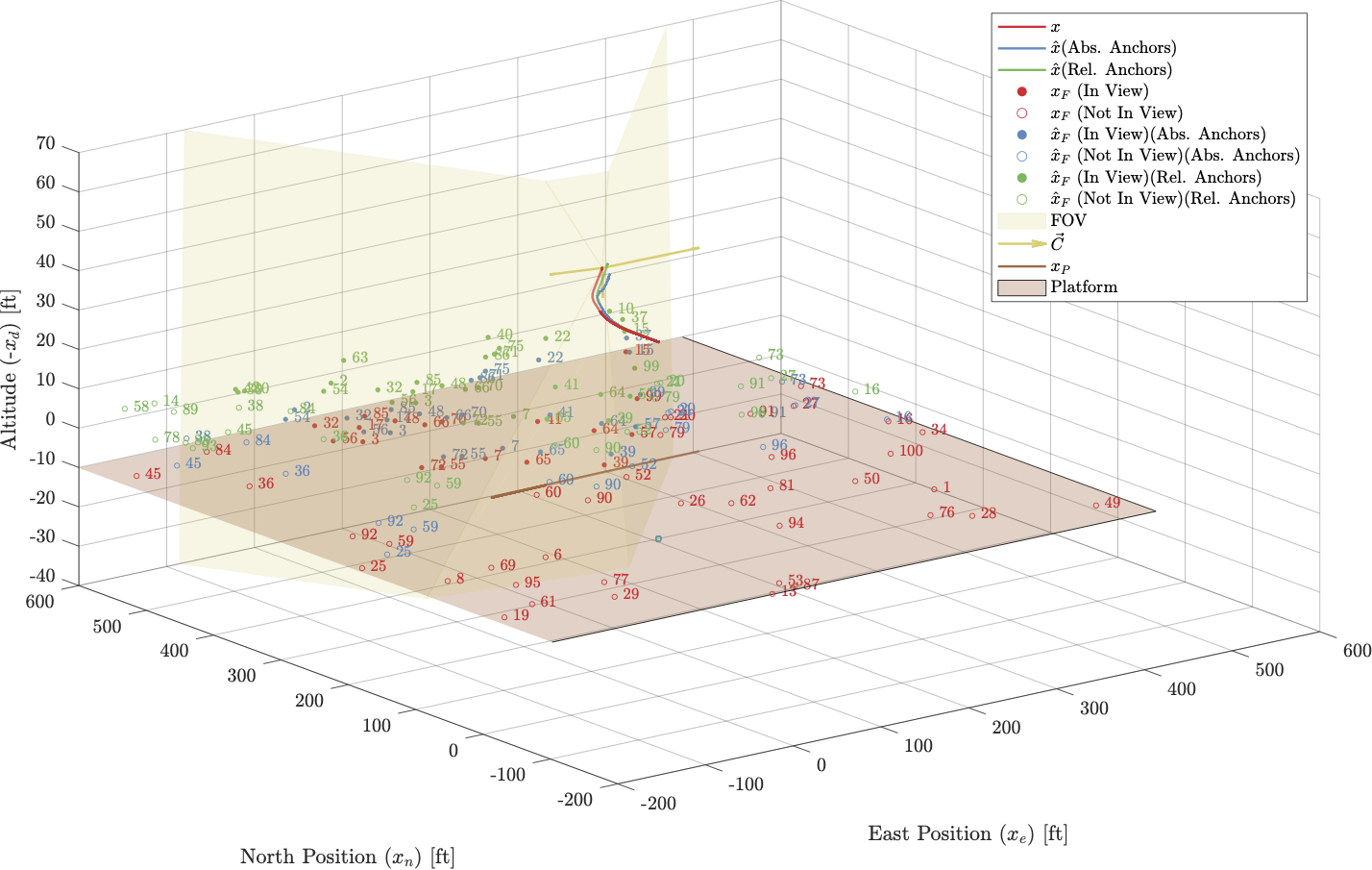
Monocular Vision-Based Navigation for UAVs in Dynamic Environments
Unmanned aerial vehicles flying in GPS-denied environments often utilize widely-available monocular cameras to aid in guidance, …
Aniruddha Perumalla
,
Thanakorn Khamvilai
,
Eric Johnson
Cite
DOI
Slides
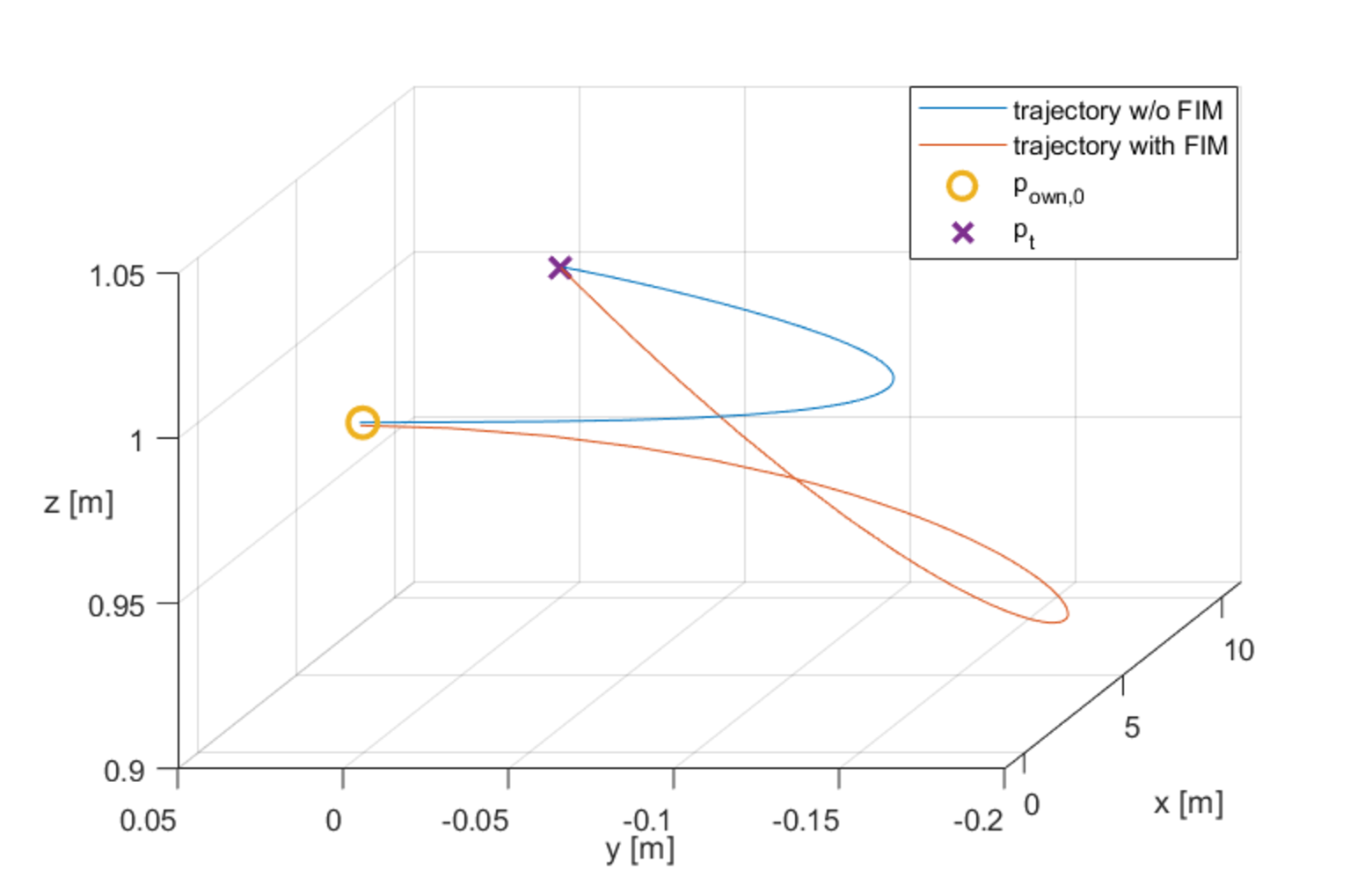
Optimal Guidance for Ship Landing Using Monocular Vision
Small unmanned aircraft systems often rely on monocular cameras. Utilizing structure from motion (SfM) techniques monocular vision …
Paul Jenny
,
Eric Johnson
,
Aniruddha Perumalla
Cite
DOI
Vision-Based Localization and Autonomous Homing for UAVs
Aniruddha Perumalla
,
Thanakorn Khamvilai
,
Eric Johnson
Cite
DOI
Homing Guidance for UAVs Using Monocular Vision-Based SLAM
Aniruddha Perumalla
,
Thanakorn Khamvilai
,
Eric Johnson
Cite
DOI
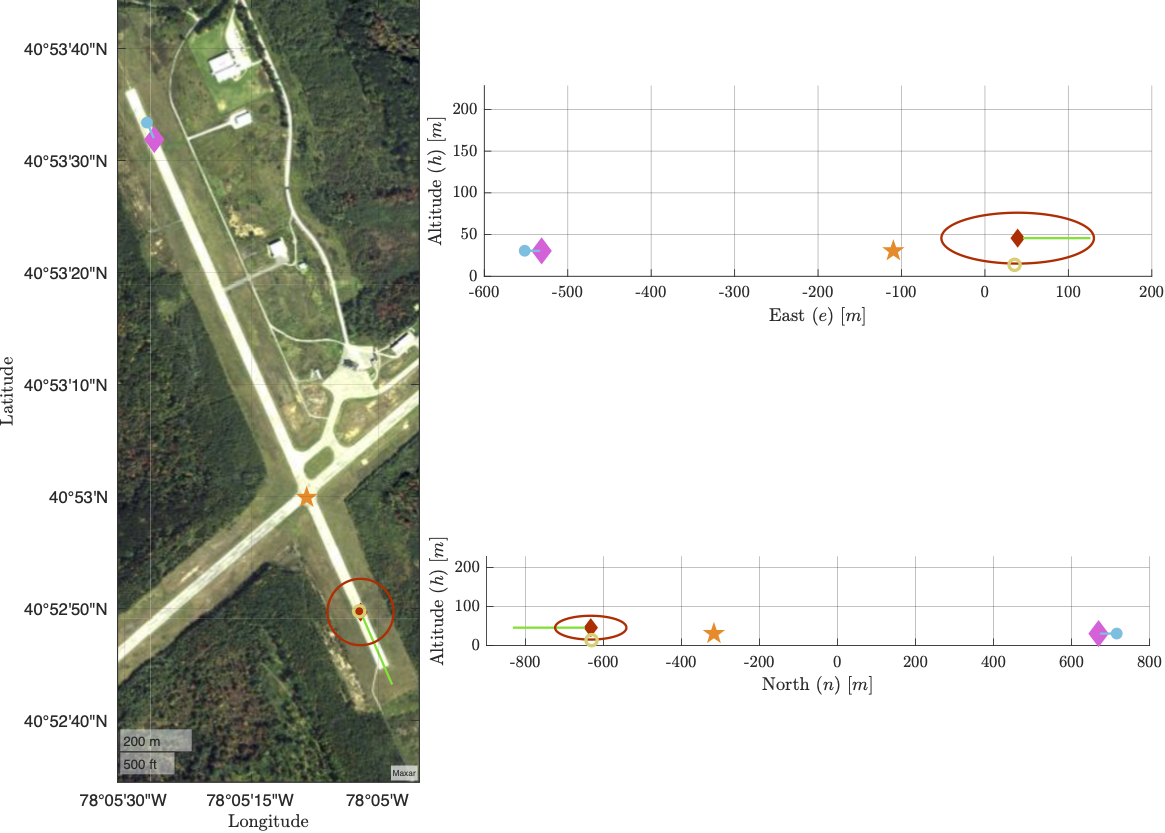
Passive Non-Cooperative Intruder State Estimation and Optimal-Feedback Avoidance System for UAVs
Aniruddha Perumalla
,
Thanakorn Khamvilai
,
Rachel Axten
,
Eric Johnson
,
Anusna Chakraborty
,
Joseph Yadegar
Cite
DOI
Optimal Intruder Collision Avoidance for UAVs via Waypoint Tracking
Aniruddha Perumalla
,
Eric Johnson
,
Puneet Singla
,
Anusna Chakraborty
,
Lukas Liebischer
Cite
PDF
Overview
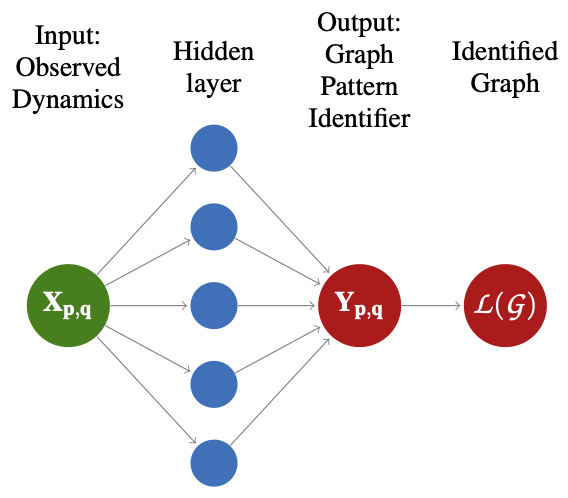
Network Topology Identification using Supervised Pattern Recognition Neural Networks
I worked on this project from spring 2020 to fall 2020 with Ahmet Taha Koru, a post-doctoral research student in the PURL lab at Penn State.
Aniruddha Perumalla
,
Ahmet Taha Koru
,
Eric Johnson
Cite
DOI
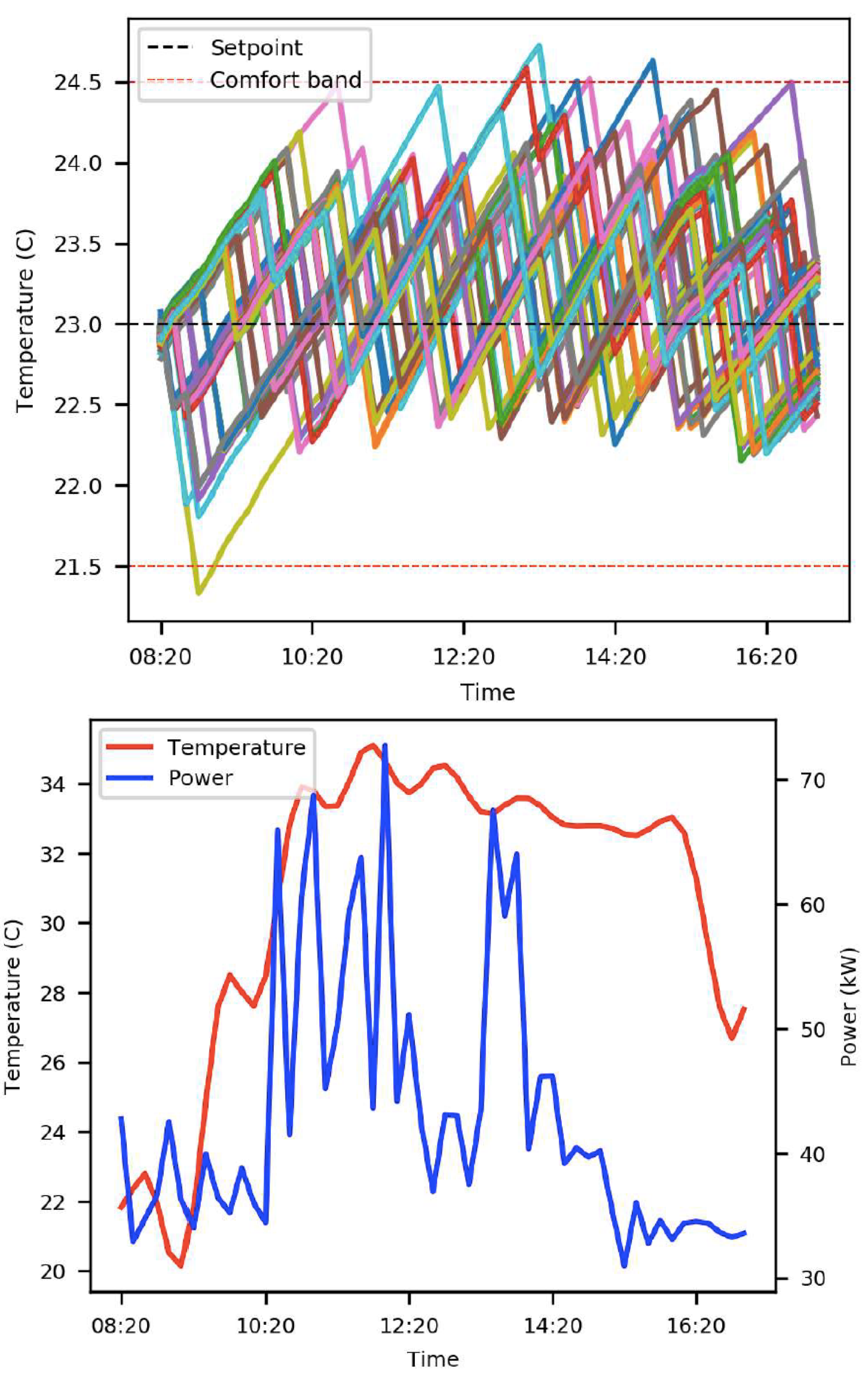
Machine Learning-based Approach to Predict the Aggregate Flexibility of HVAC Systems
I worked on this project in summer 2019, while I was an intern under Dr. Mohammed Olama at Oak Ridge National Laboratory in Oak Ridge, TN.
Mohammed Olama
,
Kadir Amasyali
,
Aniruddha Perumalla
Cite
DOI
Cite
×